-
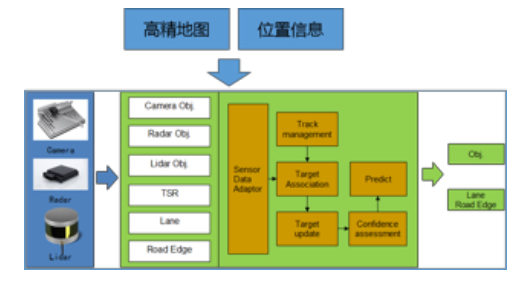
Support data integration for multiple types of sensors, including vision, LiDAR, millimeter wave, ultrasonic sensors, etc., with multiple sensors.
-
Achieve target detection based on multi-LiDAR point cloud integration and multi-millimeter wave radar point cloud data integration.
-
Improve sensing and target integration accuracy by relying on automated dynamic designation and precise time synchronization based on hardware signals.
-
Filter out false targets and reduce integrated computing resources by combining high-precision maps and vehicle positioning; expand target tracking attributes to improve target motion prediction accuracy.
-
Integrate roadside unit target information using networking equipment in order to increase target integration confidence and possess sensing ability beyond line-of-sight.